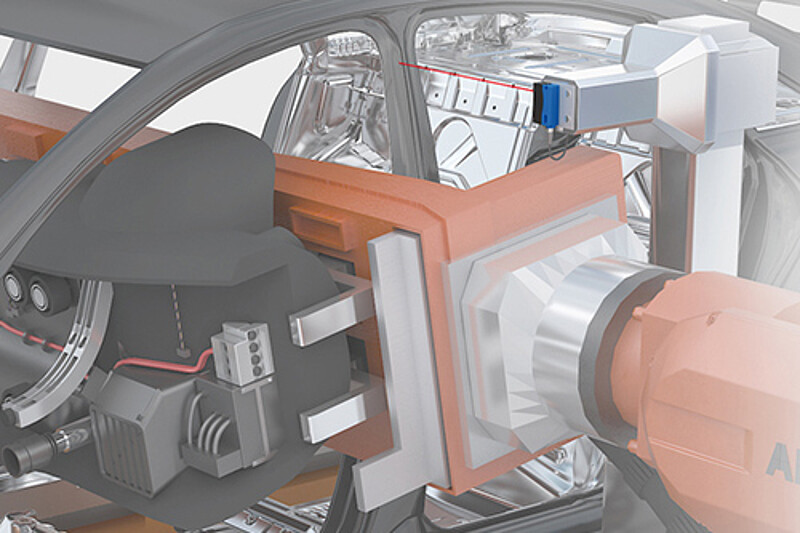
Etäisyysmittaukset robotin asemoinnissa
Auton korin on pysähdyttävä juuri haluttuun asentoon. Tämä on ainoa tapa varmistaa, että robotin tekemä asennus on sujuva. Robotin on ohjattava ohjaamo ajoneuvoon A- ja B-pilareiden välistä. Paikka, johon auton kori pysähtyy, määritetään Micro-Epsilonin valon kulkuaikaan perustuvilla optoNCDT ILR1030-8/LC1 -laserantureilla. Ne soveltuvat erityisen hyvin näihin ja muihin vastaaviin sovelluksiin lyhyen vasteaikansa vuoksi. Anturi sijaitsee ohjaamon asennusta varten samalla puolella kokoonpanolinjaa kuin kokoamisrobottikin. Mittaukset tehdään 100 Hz:n taajuudella ajoneuvon A- ja B-pilarien korkeudella ja noin 600–700 mm:n etäisyydeltä.