
























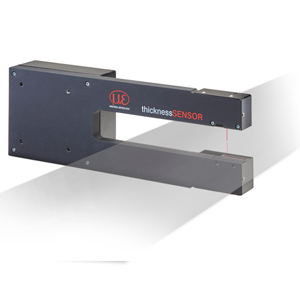




























































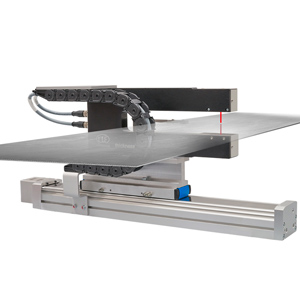
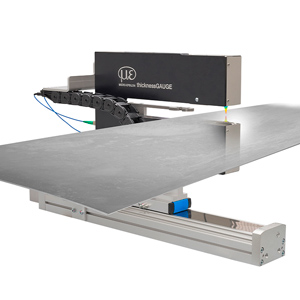
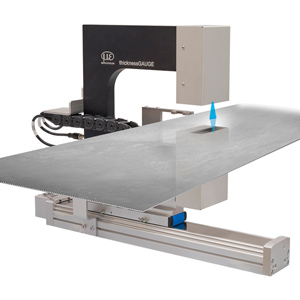

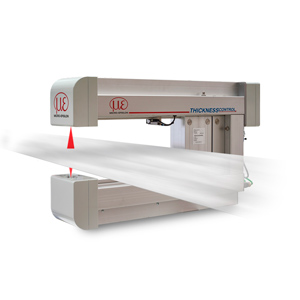
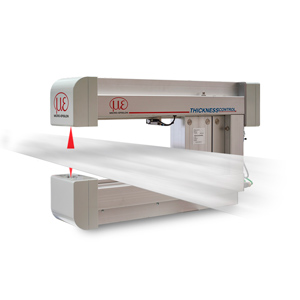





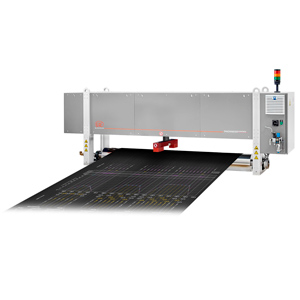
InterferoMETER IMS5200-TH -sarjan uusia valkoisen valon interferometrejä käytetään nanometrin tarkkuudella tehtäviin pinnoitteen paksuuden mittauksiin 1–100 mikrometrin alueella. Uudet valkoisen valon interferometrit sopivat ihanteellisesti…

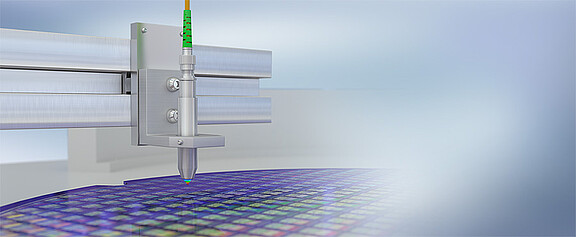
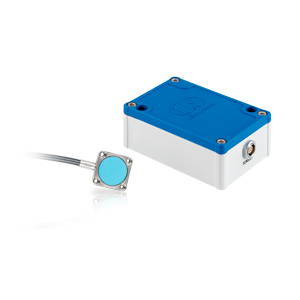
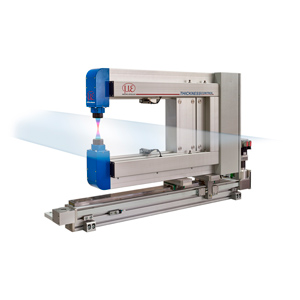
Puolijohdeteollisuudessa, optiikassa tai ilmailussa tyhjiössä tehtävät mittaukset ovat osa arkea, mutta ne asettavat myös korkeimmat vaatimukset anturiteknologialle. Micro-Epsilon tarjoaa sekä katalogi-antureita että erityisesti kehitettyjä…

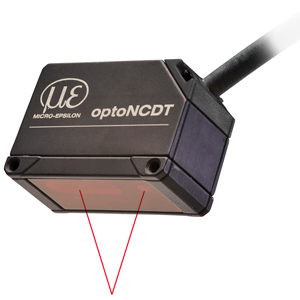
OptoNCDT-laserantureillaan Micro-Epsilon tarjoaa laajan valikoiman mittausalueita 2–1000 mm. Tämä tekee näistä antureista sopivia monenlaisiin sovelluksiin monilla eri teollisuudenaloilla.
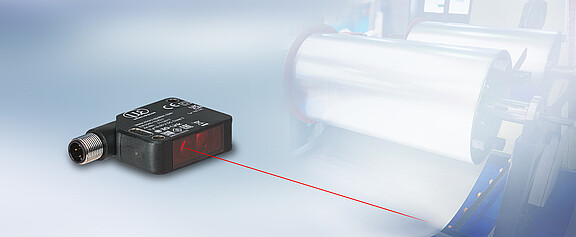
OptoNCDT ILR1040 laseretäisyysanturi tekee vaikutuksen kompaktilla muotoilullaan ja suurella tarkkuudellaan monenlaisissa sovelluksissa – automaatiosta ja logistiikasta uusiutuviin energialähteisiin ja rakennuskoneisiin. Sen korkea vakaus jopa…